
SWING, The Score-Weighted Improved NowcastinG Algorithm: Description and Application

 ,
,  , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Case Studies Description
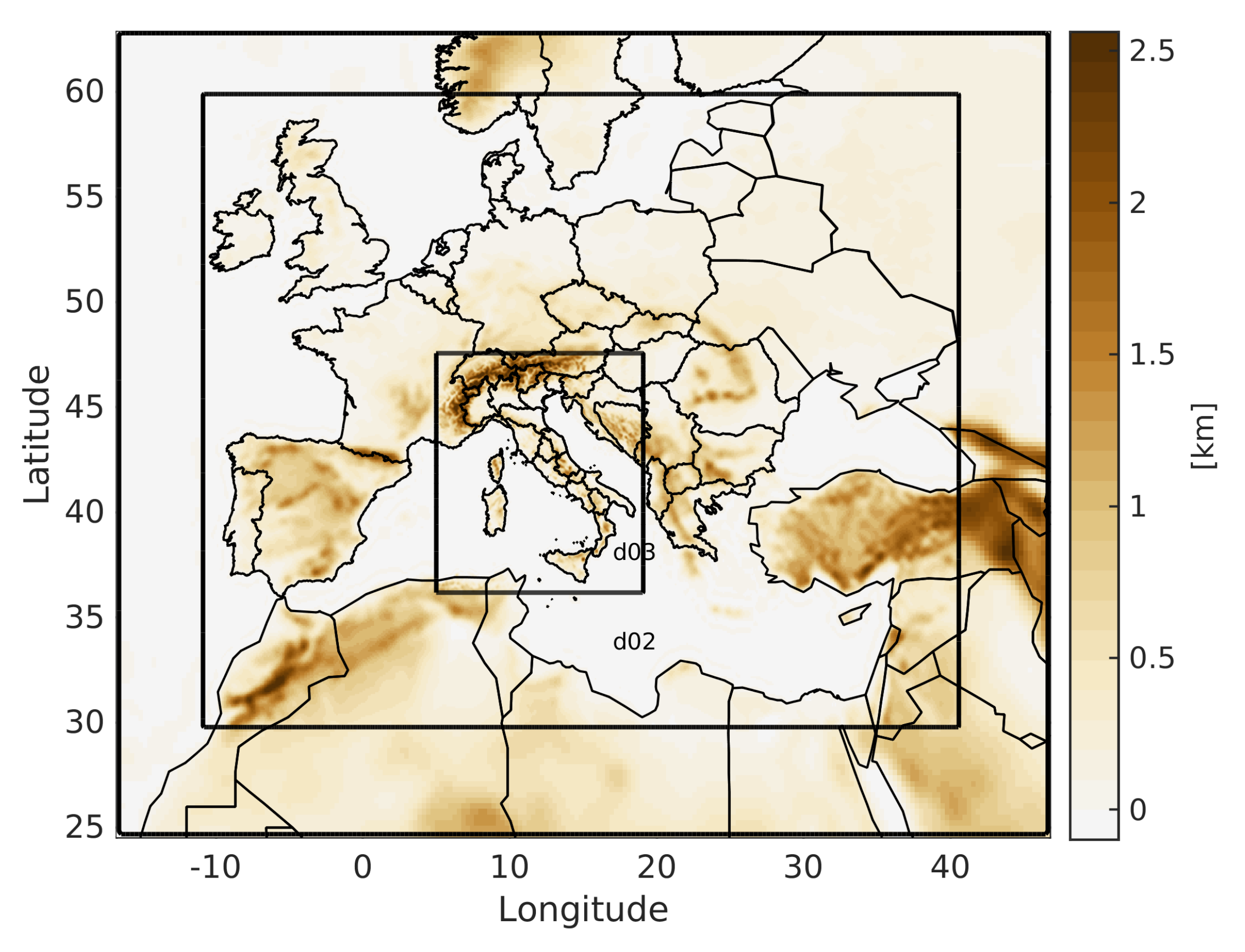
2.2. WRF Model Setup
2.3. Phast Model Setup
2.4. Observational Dataset
2.5. Swing Algorithm Methodology
Algorithm Steps Description
- Simulations selection: For each time instant (named hereafter “now”), there should be at least 3 h of simulation in the past used to evaluate the simulation behavior and assign a weight; then, the 6 h of future forecasts will be used to generate the rainfall probability maps.
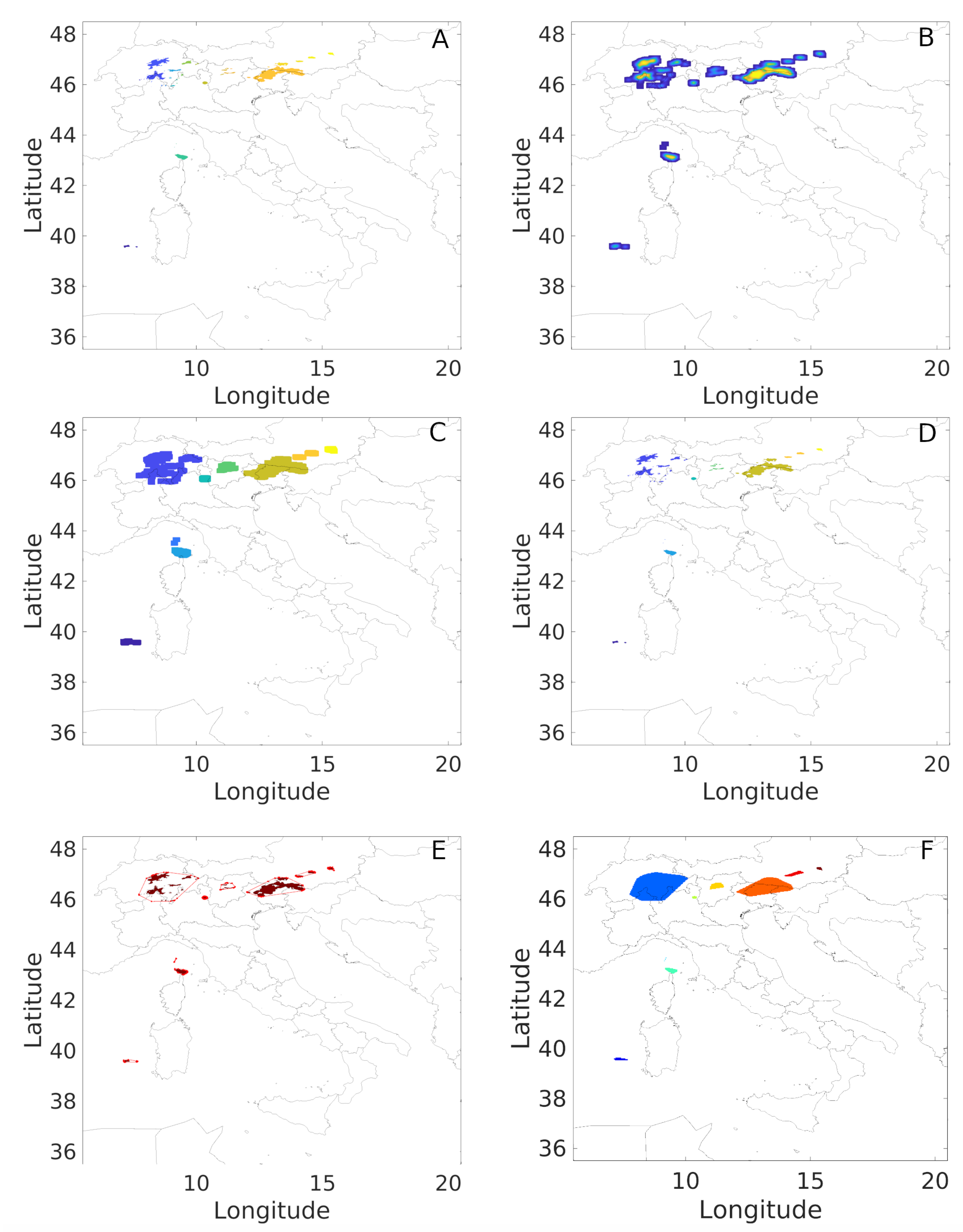
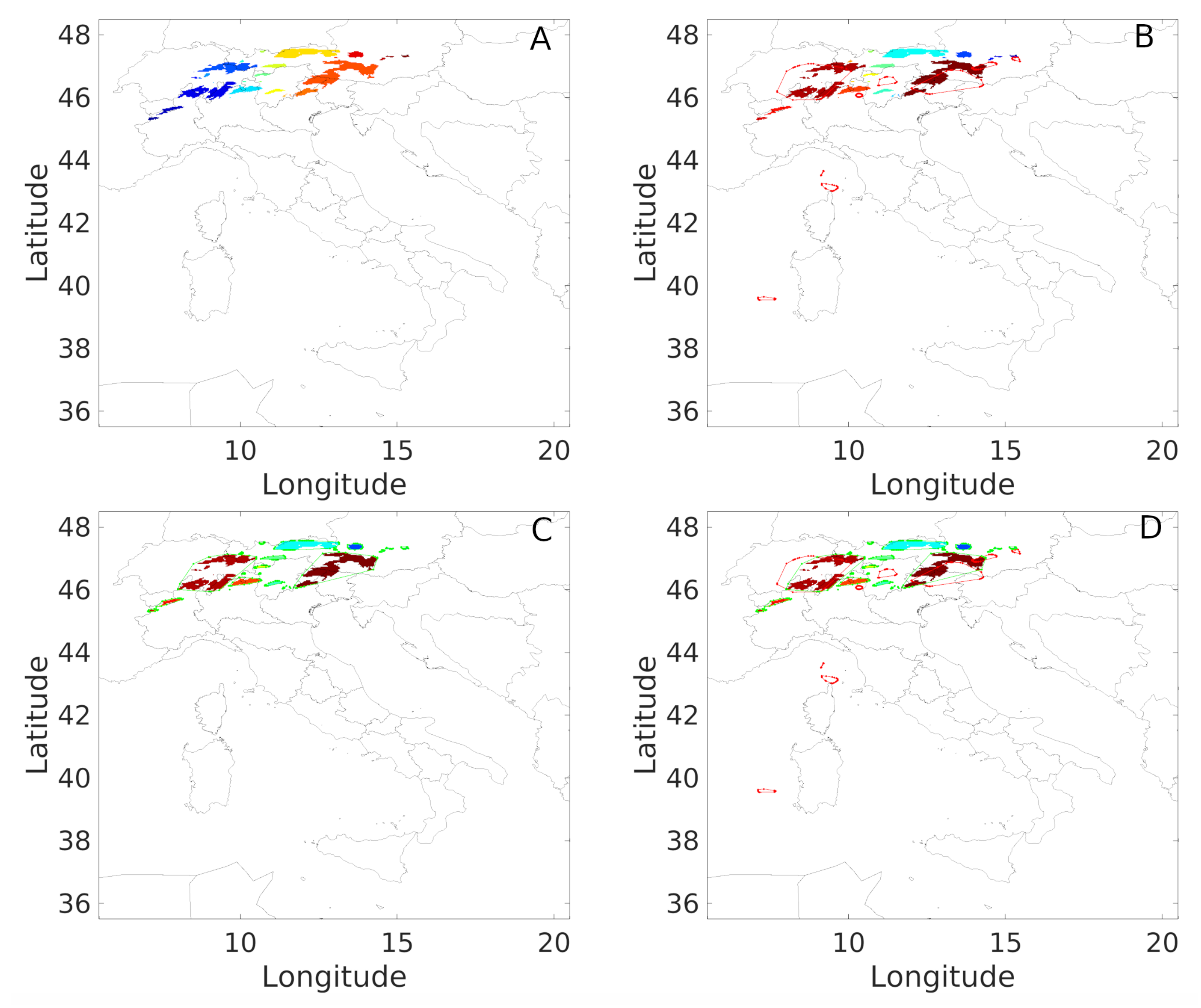
- Simulations weighting: First of all, given the observed 3 h accumulated rainfall field , the observed rainfall objects are isolated considering only the regions where > (in this case, = 2 mm, Figure 4 panel A), obtaining the field . An object , thus, is defined as a connected region (in the sense of spatially adjacent cells) of the field in which values are different from 0. Then, a Gaussian filter GF with equal to five grid points (to take into account a possible model spatial uncertainty) is applied to the observed objects to merge together those belonging to the same rainfall structure (Figure 4 panels B,C, Equation (1)).Then, the original data are restored into the identified objects (rainfall field ), and the convex hull of each object is calculated (Figure 4 panels D,E). Eventually, the observed objects convex hulls map is produced to be used as a benchmark for modeled objects. The modeled objects are isolated in the same way used for the observed ones (Figure 5 panel A). In the modeled field , instead of using a Gaussian filter to merge contiguous objects, the observed convex hulls are used to merge together the modeled objects inside the same structure (Figure 5 panels B–D). The correspondence between the observed and the modeled objects (i is the index of observed objects, while j is the index of modeled objects) is made through the various objects characteristics scores and comparison calculation that follows:
- —
- The rainfall volumes , ;
- —
- The areas , ;
- —
- The distance between the centers of gravity (, );
- —
- The objects orientation , ;
- —
- The objects intersection (, ).
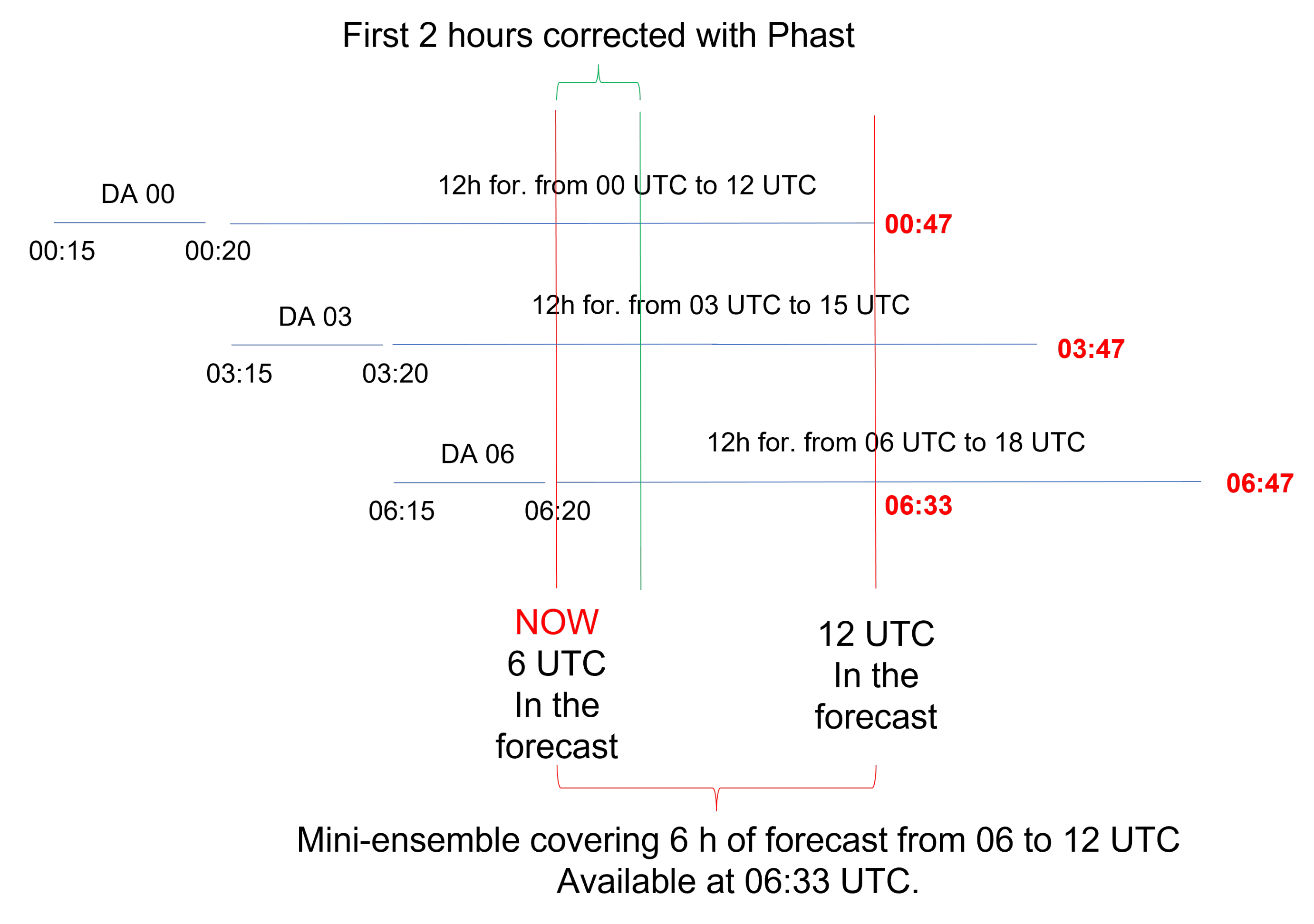
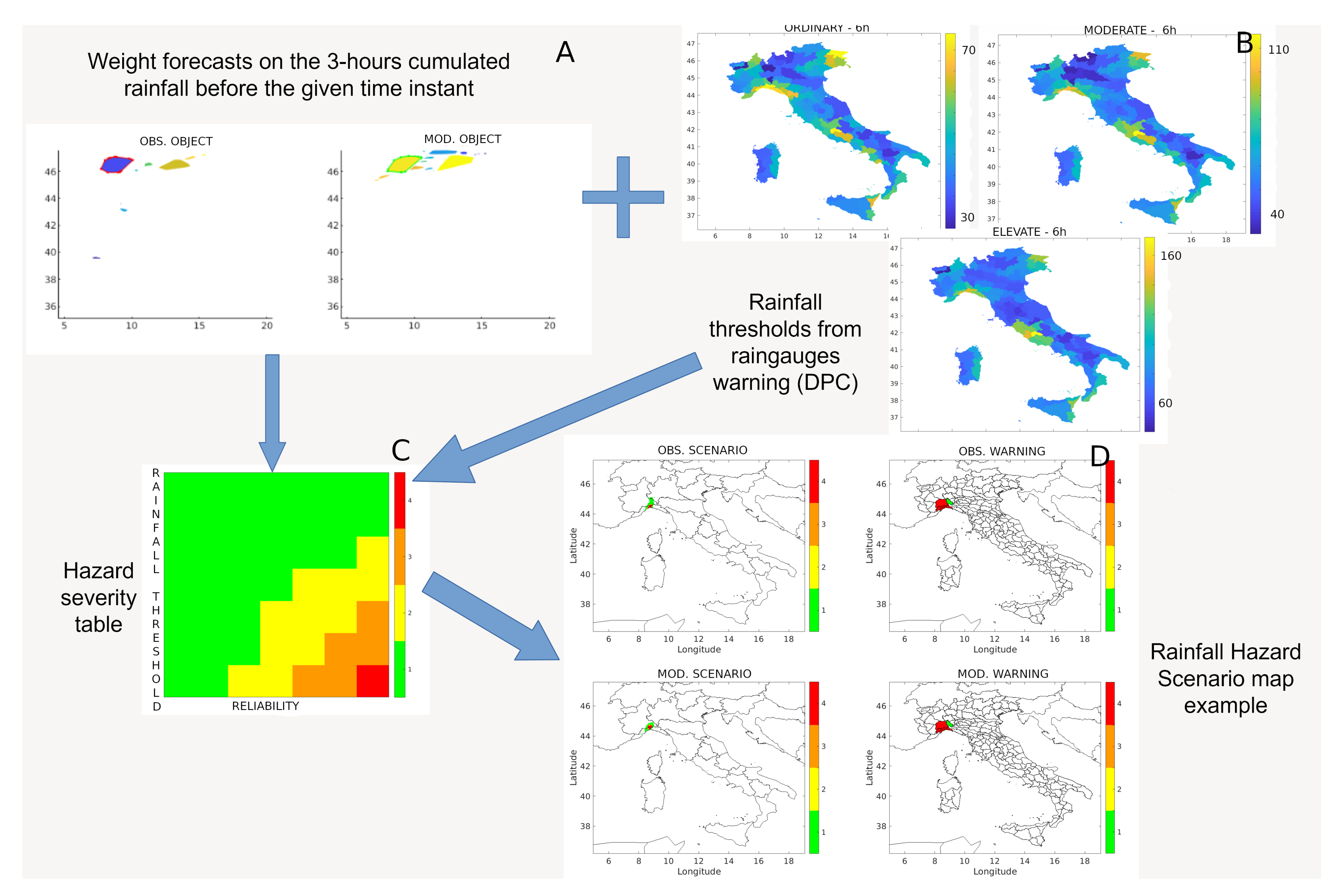
All possible objects couples (i,j, i = 1,...,, j = 1,...,, with number of observed objects and number of modeled objects ) are tested, and all these parameters are weighted and calculated among given thresholds, allowing to obtain a proper match of observed and modeled objects. Figure 6 in panel A shows an example of objects matching. Thus, the scores above introduced are also combined in an Overall Field Score (OFS) in order to weight each simulation (Equation (2)).where is the score distance between the center of gravity, and its weight is = 1, is the area ratio score whose weight is = 0.25, is the rainfall volume score and its weight is = 0.5, is the polygon intersection score, and its weight is = 1, and eventually, is the object orientation score and its weight is = 0.5.In the final forecast weight, the OFS is combined with a missed object score MOS (observed objects not present in the model, range 0–1):and a false alarm score FAS (modeled objects not present in the observation, range 0–1):into an overall Reliability Score (RS):This final score is eventually used to weight the forecast for the hazard scenario production. - Rainfall hazard scenarios production: The previously described procedure assigns the Reliability Score (RS) to each map that will be used to weight the different forecasts.Before the scenario generation, the first 2 h of the 6 h forecast are corrected using the Phast radar nowcasting and blended with the NWP prediction presented in Section 2.3 (Figure 3). Then, the accumulated rainfall field over the 6 h is calculated from the blended Phast and WRF model output. For each forecast, the rainfall depth in each cell is then classified according to a scale of four severity classes derived from three rainfall thresholds taken from the Italian Civil Department rain gauges warning system (Figure 6, panel B). Each precipitation severity map () is then multiplied by its corresponding reliability score () above introduced: in this way, a unique spatially distributed variable is obtained describing both forecast intensity and its reliability combination. Given the three forecast maps available at a certain “now” timing, the final product is the simple average of all the maps: for each pixel, thus, it represents a level of forecast hazard that synthesizes all the available forecasts weighted with their reliability (in terms, as previously described, of their ability in correctly reconstructing the previous 3 h):We describe this as a “rainfall hazard scenario forecast”, HS, being referred to a specific forecast time window (Figure 6, Panel D-second row, left panel). To compare the forecast field with the observed one, the same procedure is applied to the radar and rain gauges merging maps considering that they have 100% occurrence probability ( = 1, Figure 6, Panel D-first row, left panel). In this map, low values can correspond to both a combination of low-intensity forecast with medium-high reliability or high-intensity forecast with low reliability: this map was conceived to yield a synthetic representation of all the information delivered by the forecast and the available observations at the map production time. In order to classify these map values, a matrix of hazard scenario intensities is provided in Figure 6, panel C, in which both rainfall forecast severity and reliability axis are represented.
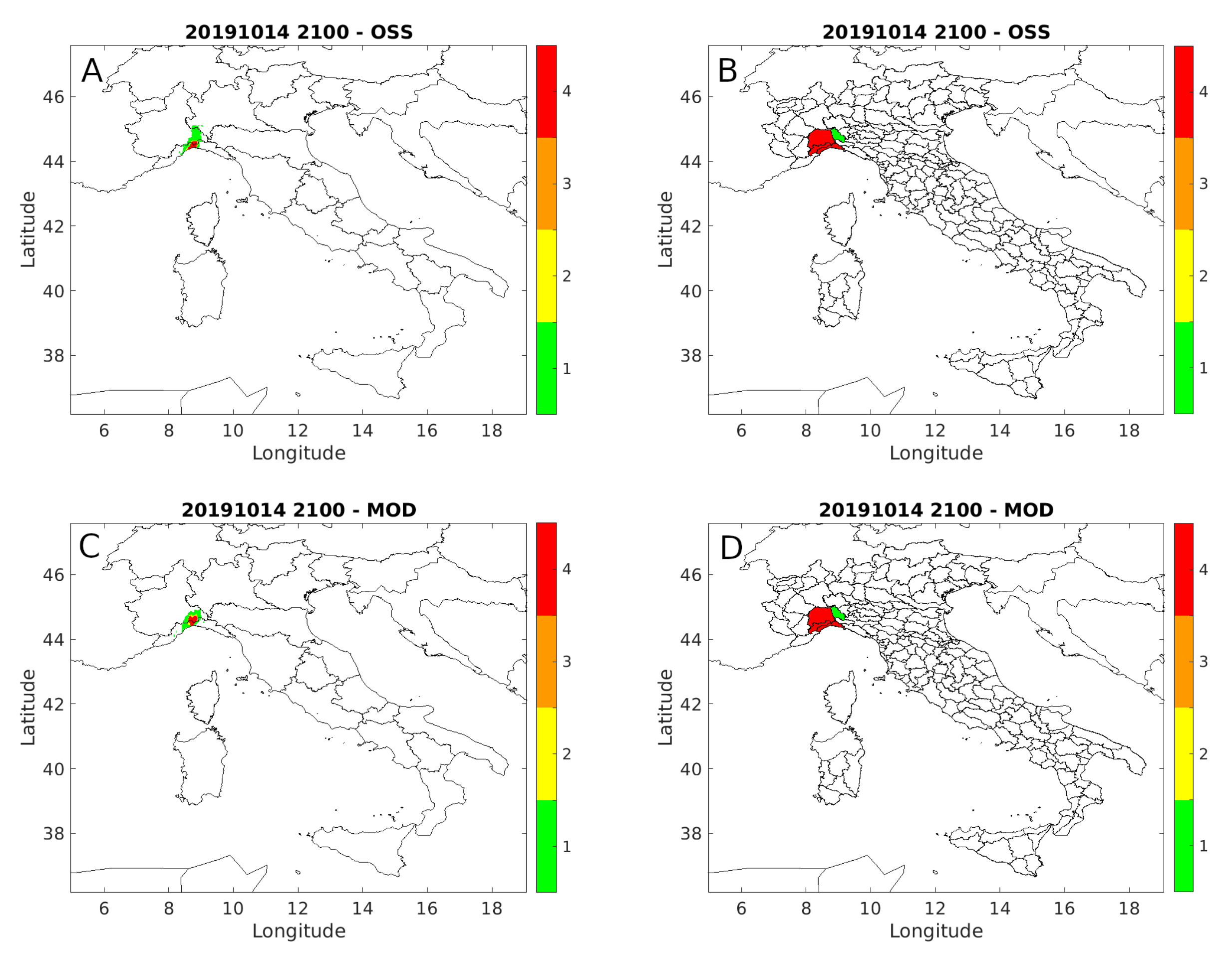
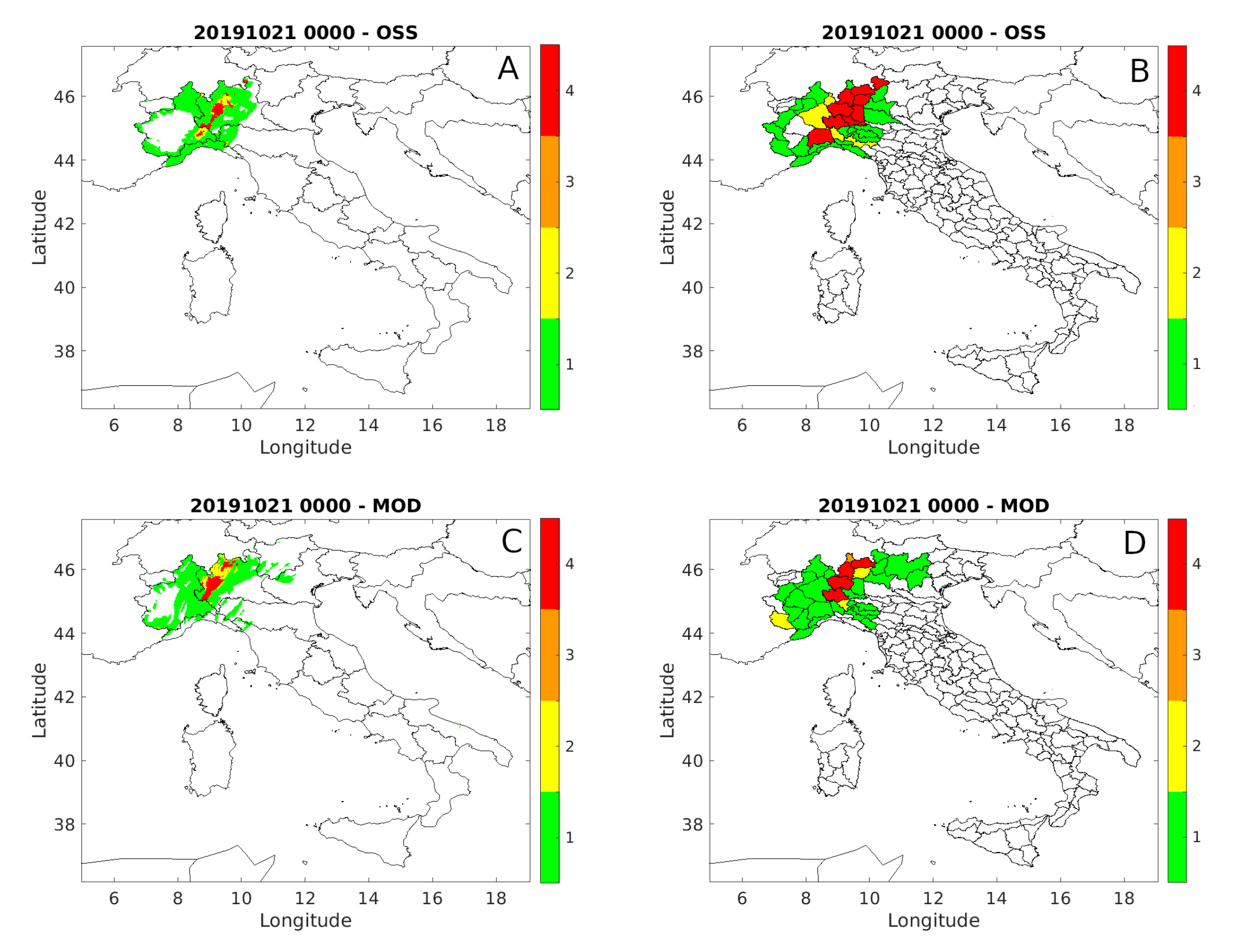
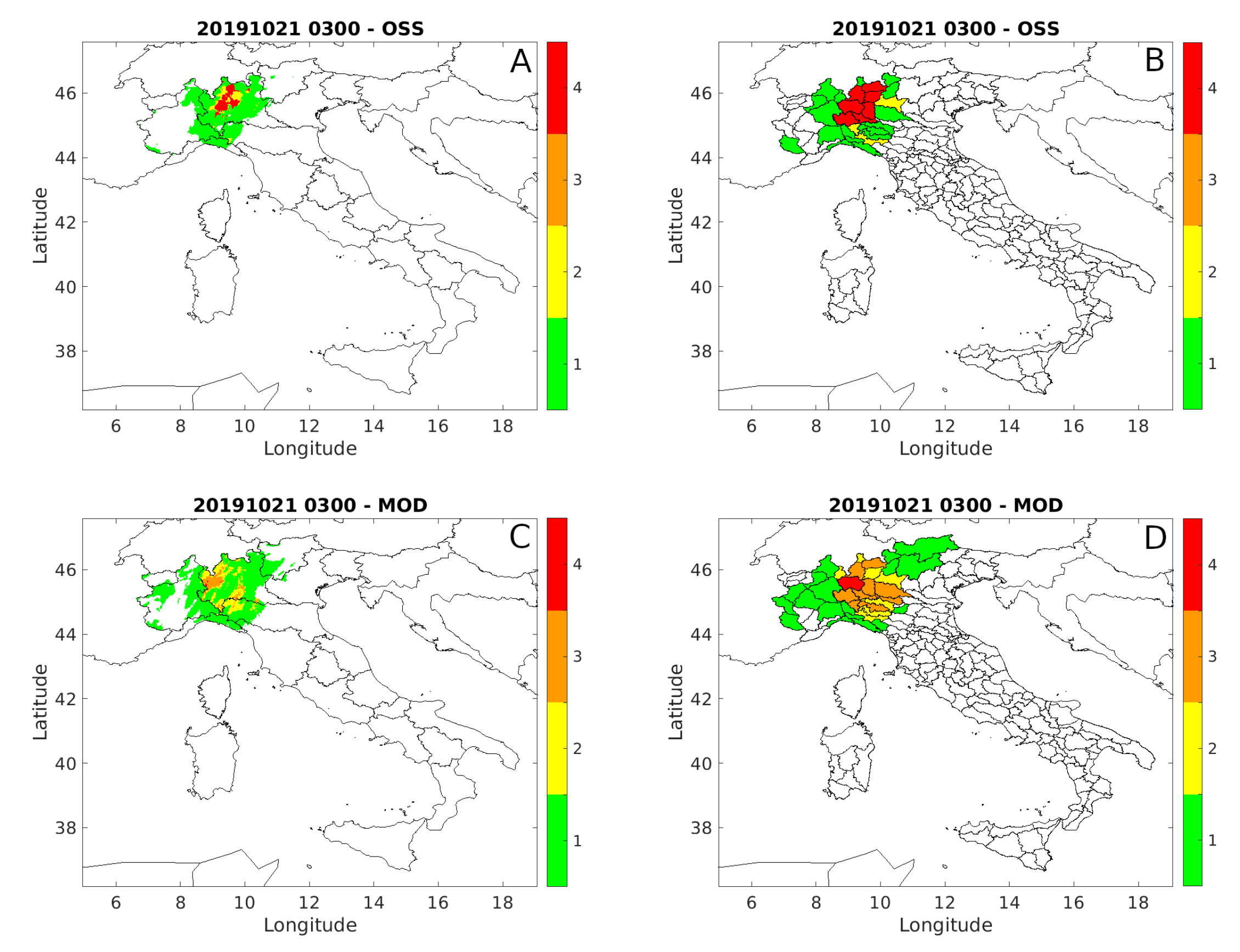
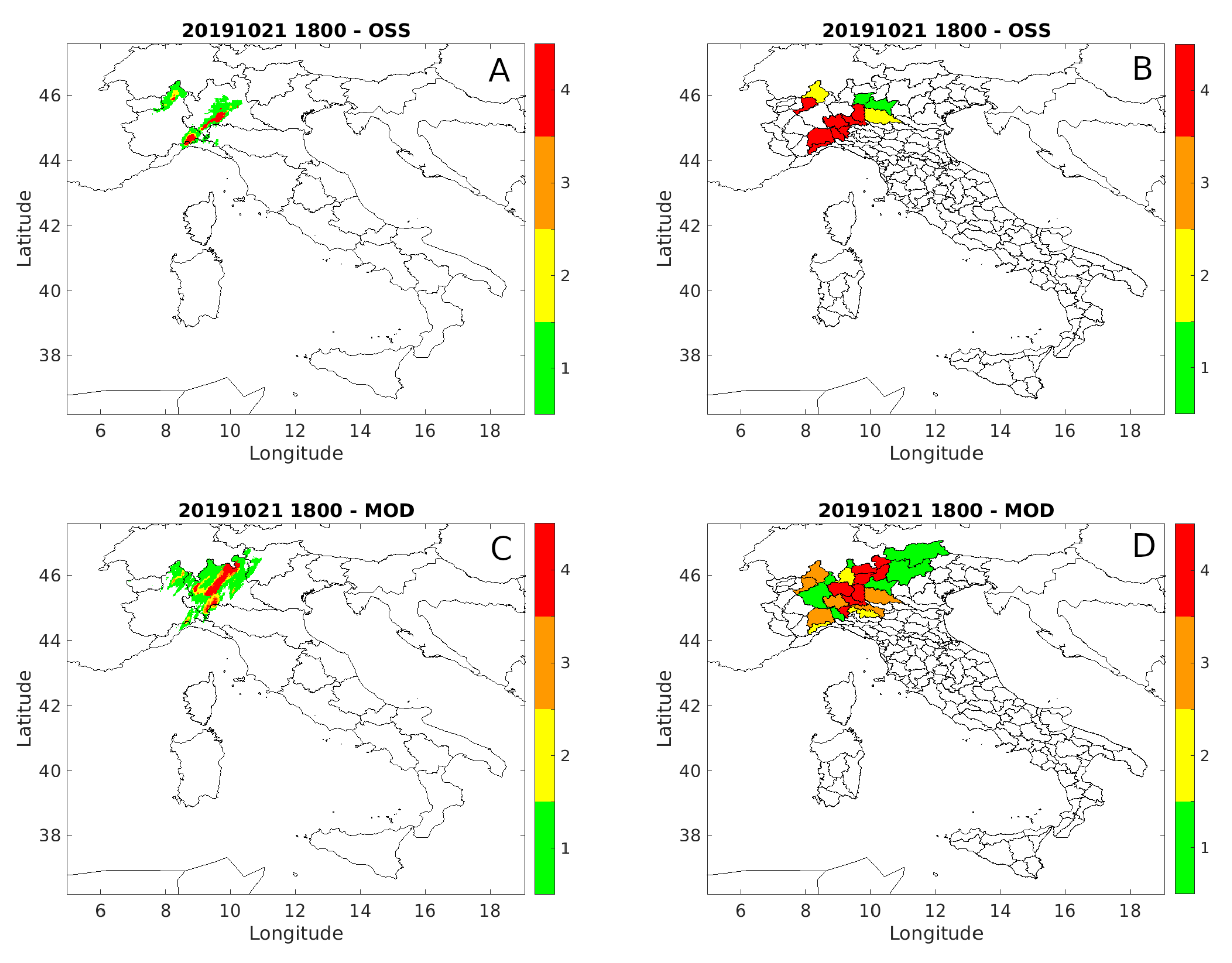
- Automatic warning system: The Italian Civil Protection Department manages the hydro-meteorological warning in terms of alert areas. The Italian territory is subdivided into 170 alert areas (Figure 6, panel D, second column). Currently, the Italian Civil Protection and regional civil protection departments alert system is based on a daily bulletin issued each day before 13 UTC reporting the forecasted situation for the following 36 h for each alert area of each Italian region. In this system, a forecaster interprets the models outputs and converts them in a warning bulletin depending also on its experience (the so-called expert forecast). This approach is compatible with a common forecast delivery timing (24–48 h), while the nowcasting procedures have necessarily very frequent output (every 3 h for the SWING algorithm) with shorter forecasts (6 h in this work). Thus, the scenarios obtained with the SWING algorithm are converted automatically into warnings on the alert areas using a procedure that retrieves the warning color considering the colored pixels inside each area trying to overcome the human interpretation (Figure 6, panel D, second column).
2.6. Verification Method
- Correct negatives: No-rain both in modeled and observed scenarios: = = 0.
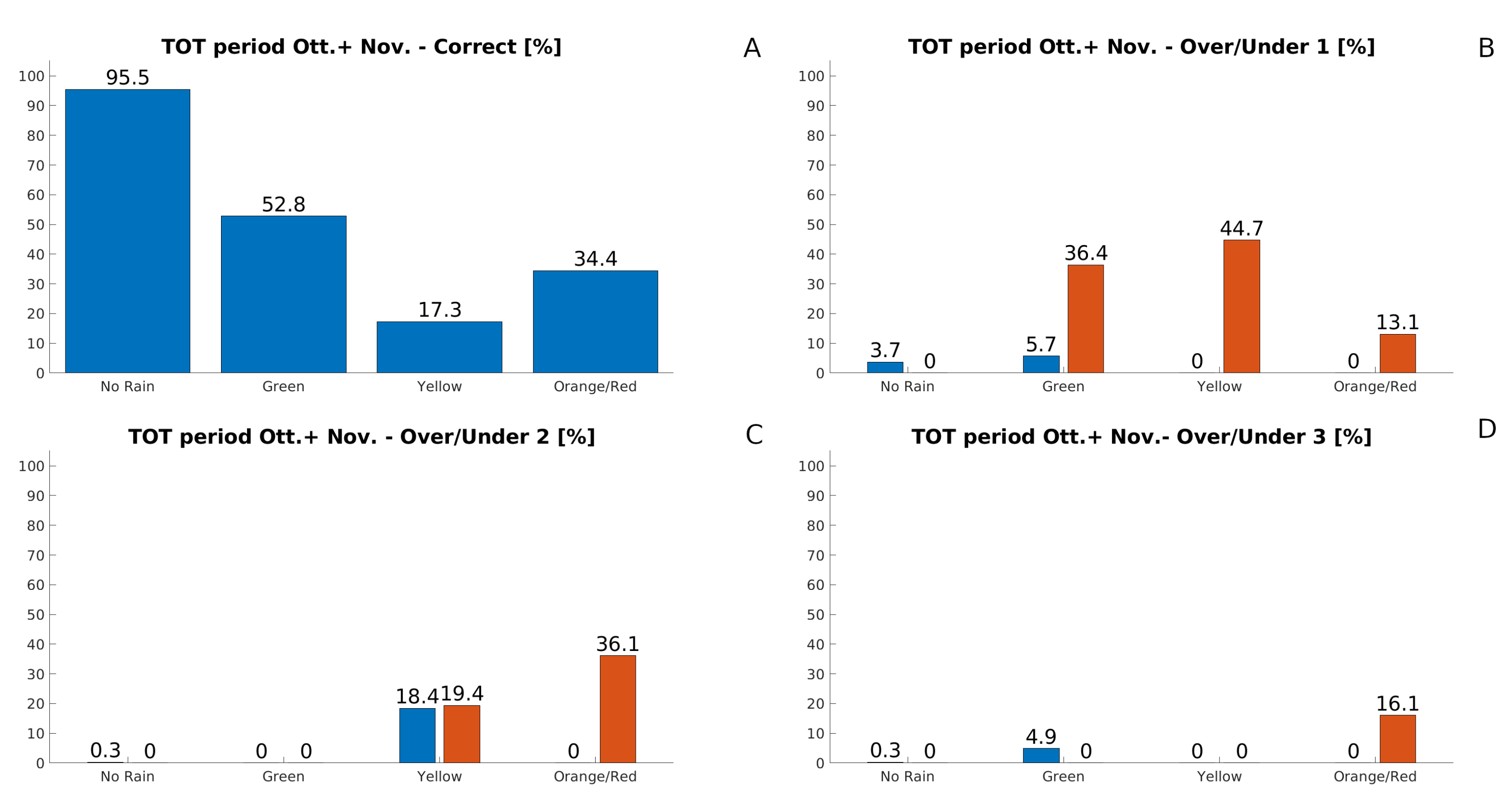
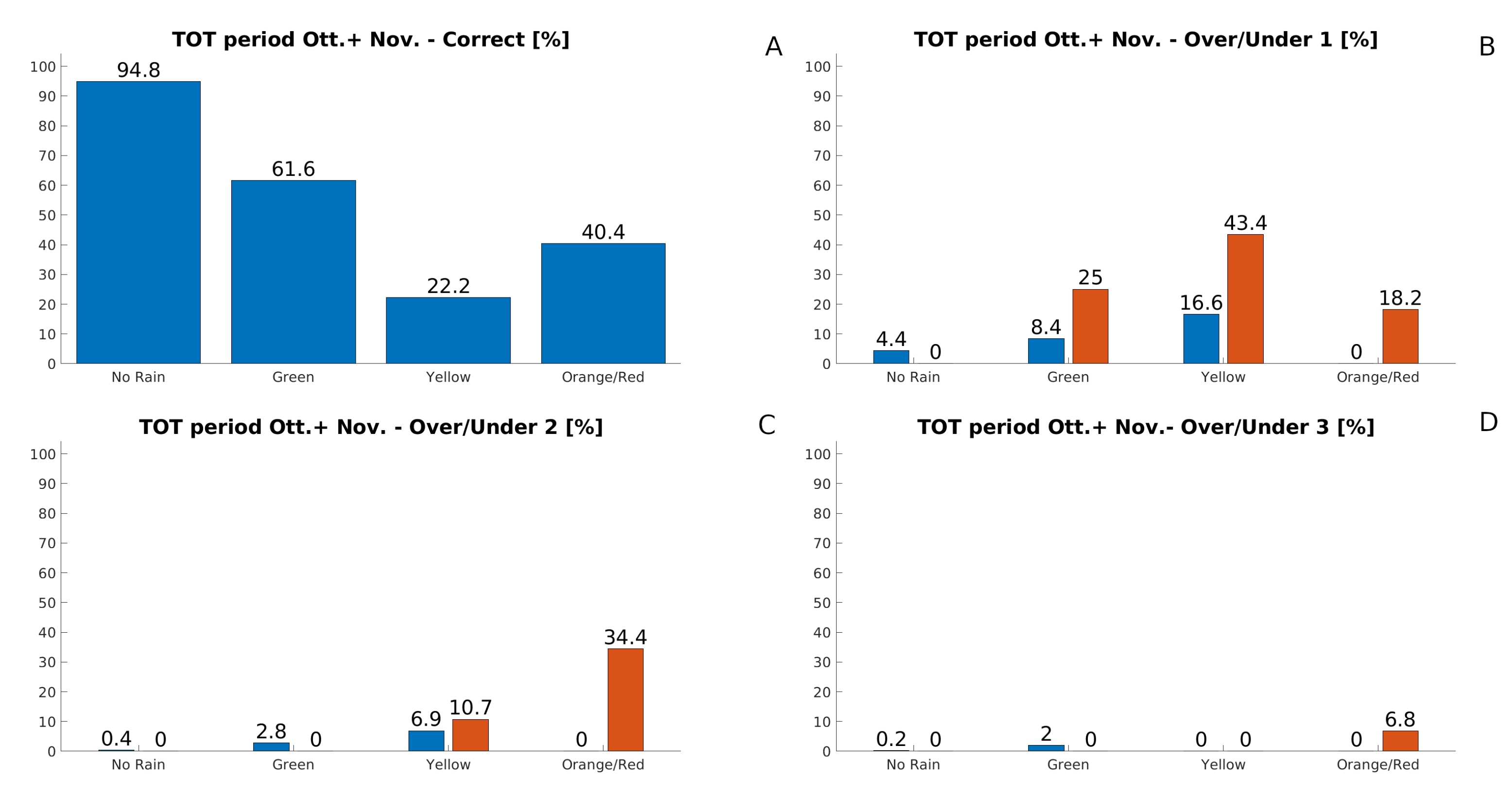
- Correct forecast: Same color both in modeled and observed scenarios: = .
- Over/underestimation by 1: The modeled area is colored by one color more/less with respect to the observed one: − = +/−1; i.e., the observed area is yellow and the modeled one is orange (overestimation by 1) or green (underestimation by 1).
- Over/underestimation by 2: The modeled area is colored by two colors more/less with respect to the observed one: − = +/−2; i.e., the observed area is yellow and the modeled one is red (overestimation by 2) or white (underestimation by 2).
- Over/underestimation by 3: The modeled area is colored by three colors more/less with respect to the observed one: − = +/−3; i.e., the observed area is green and the modeled one is red (overestimation by 3), or the observed area is red while the modeled one is green (underestimation by 3).
3. Results Discussion: SWING Algorithm Application and Validation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sideris, I.V.; Foresti, L.; Nerini, D.; Germann, U. NowPrecip: Localized precipitation nowcasting in the complex terrain of Switzerland. Q. J. R. Meteorol. Soc. 2020, 146, 1768–1800. [Google Scholar] [CrossRef]
- Sättele, M.; Bründl, M.; Straub, D. A classification of warning system for natural hazards. In Proceedings of the 10th International Probabilistic Workshop, Stuttgart, Germany, 15–16 November 2012; pp. 257–270. [Google Scholar]
- Twardosz, R.; Walanus, A.; Guzik, I. Warming in Europe: Recent trends in annual and seasonal temperatures. Pure Appl. Geophys. 2021, 178, 4021–4032. [Google Scholar] [CrossRef]
- Gaume, E.; Borga, M.; Llassat, M.C.; Maouche, S.; Lang, M.; Diakakis, M. Mediterranean extreme floods and flash floods. Mediterr. Reg. Clim. Change 2016, 133–144. [Google Scholar]
- Rebora, N.; Molini, L.; Casella, E.; Comellas, A.; Fiori, E.; Pignone, F.; Siccardi, F.; Silvestro, F.; Tanelli, S.; Parodi, A. Extreme rainfall in the Mediterranean: What can we learn from observations? J. Hydrometeorol. 2013, 14, 906–922. [Google Scholar] [CrossRef]
- Ducrocq, V.; Braud, I.; Davolio, S.; Ferretti, R.; Flamant, C.; Jansa, A.; Kalthoff, N.; Richard, E.; Taupier-Letage, I.; Ayral, P.A.; et al. HyMeX-SOP1: The field campaign dedicated to heavy precipitation and flash flooding in the northwestern Mediterranean. Bull. Am. Meteorol. Soc. 2014, 95, 1083–1100. [Google Scholar] [CrossRef] [Green Version]
- Fiori, E.; Ferraris, L.; Molini, L.; Siccardi, F.; Kranzlmueller, D.; Parodi, A. Triggering and evolution of a deep convective system in the Mediterranean sea: Modelling and observations at a very fine scale. Q. J. R. Meteorol. Soc. 2017, 143, 927–941. [Google Scholar] [CrossRef]
- Lagasio, M.; Silvestro, F.; Campo, L.; Parodi, A. Predictive capability of a high-resolution hydrometeorological forecasting framework coupling WRF cycling 3dvar and Continuum. J. Hydrol. 2019, 20, 1307–1337. [Google Scholar] [CrossRef]
- Done, J.; Davis, C.A.; Weisman, M. The next generation of NWP: Explicit forecasts of convection using the Weather Research and Forecasting (WRF) model. Atmos. Sci. Lett. 2004, 5, 110–117. [Google Scholar] [CrossRef]
- Kain, J.S.; Weiss, S.J.; Levit, J.J.; Baldwin, M.E.; Bright, D.R. Examination of convection-allowing configurations of the WRF model for the prediction of severe convective weather: The SPC/NSSL Spring Program 2004. Weather Forecast. 2006, 21, 167–181. [Google Scholar] [CrossRef] [Green Version]
- Weisman, M.L.; Davis, C.; Wang, W.; Manning, K.W.; Klemp, J.B. Experiences with 0–36-h explicit convective forecasts with the WRF-ARW model. Weather Forecast. 2008, 23, 407–437. [Google Scholar] [CrossRef]
- Clark, A.J.; Gallus, W.A., Jr.; Xue, M.; Kong, F. A comparison of precipitation forecast skill between small convection-allowing and large convection-parameterizing ensembles. Weather Forecast. 2009, 24, 1121–1140. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Xue, M.; Wilson, J.W.; Zawadzki, I.; Ballard, S.P.; Onvlee-Hooimeyer, J.; Joe, P.; Barker, D.M.; Li, P.W.; Golding, B.; et al. Use of NWP for nowcasting convective precipitation: Recent progress and challenges. Bull. Am. Meteorol. Soc. 2014, 95, 409–426. [Google Scholar] [CrossRef] [Green Version]
- Benjamin, S.G.; Dévényi, D.; Weygandt, S.S.; Brundage, K.J.; Brown, J.M.; Grell, G.A.; Kim, D.; Schwartz, B.E.; Smirnova, T.G.; Smith, T.L.; et al. An hourly assimilation–forecast cycle: The RUC. Mon. Weather Rev. 2004, 132, 495–518. [Google Scholar] [CrossRef]
- Sun, J.; Trier, S.B.; Xiao, Q.; Weisman, M.L.; Wang, H.; Ying, Z.; Xu, M.; Zhang, Y. Sensitivity of 0–12-h warm-season precipitation forecasts over the central United States to model initialization. Weather Forecast. 2012, 27, 832–855. [Google Scholar] [CrossRef]
- Germann, U.; Zawadzki, I.; Turner, B. Predictability of precipitation from continental radar images. Part IV: Limits to prediction. J. Atmos. Sci. 2006, 63, 2092–2108. [Google Scholar] [CrossRef]
- Golding, B. Nimrod: A system for generating automated very short range forecasts. Meteor. Appl. 1998, 5, 1–16. [Google Scholar] [CrossRef]
- Poletti, M.L.; Silvestro, F.; Davolio, S.; Pignone, F.; Rebora, N. Using nowcasting technique and data assimilation in a meteorological model to improve very short range hydrological forecasts. Hydrol. Earth Syst. Sci. 2019, 23, 3823–3841. [Google Scholar] [CrossRef] [Green Version]
- Metta, S.; von Hardenberg, J.; Ferraris, L.; Rebora, N.; Provenzale, A. Precipitation nowcasting by a spectral-based nonlinear stochastic model. J. Hydrometeorol. 2009, 10, 1285–1297. [Google Scholar] [CrossRef]
- Arpa Liguria. Report 173-14-20 Ottobre 2019. 2019. Available online: https://www.arpal.liguria.it/contenuti_statici/pubblicazioni/rapporti_eventi/2019/Report_speditivo_20191014-20191108_vers20191118.pdf (accessed on 30 May 2022). (In Italian).
- Arpa Piemonte. Eventi Idrometeorologici Dal 19 al 24 Ottobre 2019. 2019. Available online: http://www.arpa.piemonte.it/news/pubblicato-il-rapporto-sugli-eventi-idrometeorologici-di-ottobre-2019 (accessed on 30 May 2022). (In Italian).
- Molini, L.; Parodi, A.; Rebora, N.; Craig, G.C. Classifying severe rainfall events over Italy by hydrometeorological and dynamical criteria. Q. J. R. Meteorol. Soc. 2011, 137, 148–154. [Google Scholar] [CrossRef]
- Lagasio, M.; Meroni, A.N.; Boni, G.; Pulvirenti, L.; Monti-Guarnieri, A.; Haagmans, R.; Hobbs, S.; Parodi, A. Meteorological osses for new zenith total delay observations: Impact assessment for the hydroterra geosynchronous satellite on the october 2019 genoa event. Remote Sens. 2020, 12, 3787. [Google Scholar] [CrossRef]
- Parodi, A.; Boni, G.; Ferraris, L.; Siccardi, F.; Pagliara, P.; Trovatore, E.; Foufoula-Georgiou, E.; Kranzlmueller, D. The “perfect storm”: From across the Atlantic to the hills of Genoa. Eos Trans. Am. Geophys. Union 2012, 93, 225–226. [Google Scholar] [CrossRef]
- Fiori, E.; Comellas, A.; Molini, L.; Rebora, N.; Siccardi, F.; Gochis, D.; Tanelli, S.; Parodi, A. Analysis and hindcast simulations of an extreme rainfall event in the Mediterranean area: The Genoa 2011 case. Atmos. Res. 2014, 138, 13–29. [Google Scholar] [CrossRef] [Green Version]
- Duffourg, F.; Nuissier, O.; Ducrocq, V.; Flamant, C.; Chazette, P.; Delanoë, J.; Doerenbecher, A.; Fourrié, N.; Di Girolamo, P.; Lac, C.; et al. Offshore deep convection initiation and maintenance during the HyMeX IOP 16a heavy precipitation event. Q. J. R. Meteorol. Soc. 2016, 142, 259–274. [Google Scholar] [CrossRef]
- Silvestro, F.; Rebora, N.; Giannoni, F.; Cavallo, A.; Ferraris, L. The flash flood of the Bisagno Creek on 9th October 2014: An “unfortunate” combination of spatial and temporal scales. J. Hydrol. 2016, 541, 50–62. [Google Scholar] [CrossRef] [Green Version]
- Silvestro, F.; Rebora, N.; Rossi, L.; Dolia, D.; Gabellani, S.; Pignone, F.; Trasforini, E.; Rudari, R.; De Angeli, S.; Masciulli, C. What if the 25 October 2011 event that struck Cinque Terre (Liguria) had happened in Genoa, Italy? Flooding scenarios, hazard mapping and damage estimation. Nat. Hazards Earth Syst. Sci. 2016, 16, 1737–1753. [Google Scholar] [CrossRef] [Green Version]
- Cassola, F.; Ferrari, F.; Mazzino, A.; Miglietta, M. The role of the sea on the flash floods events over Liguria (northwestern Italy). Geophys. Res. Lett. 2016, 43, 3534–3542. [Google Scholar] [CrossRef]
- Lagasio, M.; Parodi, A.; Procopio, R.; Rachidi, F.; Fiori, E. Lightning potential index performances in multimicrophysical cloud-resolving simulations of a back-building mesoscale convective system: The Genoa 2014 event. J. Geophys. Res. Atmos. 2017, 122, 4238–4257. [Google Scholar] [CrossRef]
- Parodi, A.; Ferraris, L.; Gallus, W.; Maugeri, M.; Molini, L.; Siccardi, F.; Boni, G. Ensemble cloud-resolving modelling of a historic back-building mesoscale convective system over Liguria: The San Fruttuoso case of 1915. Clim. Past 2017, 13, 455–472. [Google Scholar] [CrossRef] [Green Version]
- Faccini, F.; Piccazzo, M.; Robbiano, A. Natural hazards in San Fruttuoso of Camogli (Portofino Park, Italy): A case study of a debris flow in a coastal environment. Boll. Della Soc. Geol. Ital. 2009, 128, 641–654. [Google Scholar]
- Maifredi, P. Ancient big landslide evolution and related effects on floods in Genoa in 1953, 1970 and. Nat. Risk Civ. Prot. 1995, 16050, 237. [Google Scholar]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Duda, M.; Wang, X.Y.; Wang, W.; Power, J.G. A Description of the Advanced Research WRF Version 3. In NCAR Technical Note-475+ STR; National Center for Atmospheric Research: Boulder, CO, USA, 2008; p. 113. [Google Scholar] [CrossRef]
- Paulson, C.A. The mathematical representation of wind speed and temperature profiles in the unstable atmospheric surface layer. J. Appl. Meteorol. 1970, 9, 857–860. [Google Scholar] [CrossRef]
- Dyer, A.J.; Hicks, B.B. Flux-gradient relationships in the constant flux layer. Q. J. R. Meteorol. Soc. 1970, 96, 715–721. [Google Scholar] [CrossRef]
- Webb, E.K. Profile relationships: The log-linear range, and extension to strong stability. Q. J. R. Meteorol. Soc. 1970, 96, 67–90. [Google Scholar] [CrossRef]
- Beljaars, A.C. The parametrization of surface fluxes in large-scale models under free convection. Q. J. R. Meteorol. Soc. 1995, 121, 255–270. [Google Scholar] [CrossRef]
- Smirnova, T.G.; Brown, J.M.; Benjamin, S.G. Performance of different soil model configurations in simulating ground surface temperature and surface fluxes. Mon. Weather Rev. 1997, 125, 1870–1884. [Google Scholar] [CrossRef]
- Smirnova, T.G.; Brown, J.M.; Benjamin, S.G.; Kim, D. Parameterization of cold season processes in the MAPS land-surface scheme. J. Geophys. Res. 2000, 105, 4077–4086. [Google Scholar] [CrossRef]
- Hong, S.Y.; Noh, Y.; Dudhia, J. A new vertical diffusion package with an explicit treatment of entrainment processes. Mon. Weather Rev. 2006, 134, 2318–2341. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.Y.; Lim, J.O.J. The WRF single-moment 6-class microphysics scheme (WSM6). J. Korean Meteorol. Soc. 2006, 42, 129–151. [Google Scholar]
- Iacono, M.J.; Delamere, J.S.; Mlawer, E.J.; Shephard, M.W.; Clough, S.A.; Collins, W.D. Radiative forcing by long-lived greenhouse gases: Calculations with the AER radiative transfer models. J. Geophys. Res. Atmos. 2008, 113, D13103. [Google Scholar] [CrossRef]
- Wang, H.; Huang, X.Y.; Sun, J.; Xu, D.; Zhang, M.; Fan, S.; Zhong, J. Inhomogeneous background error modeling for WRF-Var using the NMC method. J. Appl. Meteor. Climatol. 2014, 53, 2287–2309. [Google Scholar] [CrossRef] [Green Version]
- Vulpiani, G.; Pagliara, P.; Negri, M.; Rossi, L.; Gioia, A.; Giordano, P.; Alberoni, P.P.; Cremonini, R.; Ferraris, L.; Marzano, F.S. The Italian radar network within the national early-warning system for multi-risks management. In Proceedings of the Fifth European Conference on Radar in Meteorology and Hydrology (ERAD 2008), Helsinki, Finland, 30 June–4 July 2008; Volume 184. [Google Scholar]
- Vulpiani, G.; Guerriero, E.; Giordano, P.; Negri, M.; Pagliara, P. The Italian radar QPE: Description performance analysis and perspectives. In Proceedings of the 15th Plinius Conference on Mediterranean Risks, Giardini, Naxos, Italy, 8–11 June 2016. [Google Scholar]
- Vulpiani, G.; Montopoli, M.; Passeri, L.D.; Gioia, A.G.; Giordano, P.; Marzano, F.S. On the use of dual-polarized C-band radar for operational rainfall retrieval in mountainous areas. J. Appl. Meteorol. Climatol. 2012, 51, 405–425. [Google Scholar] [CrossRef]
- Vulpiani, G.; Baldini, L.; Roberto, N. Characterization of Mediterranean hail-bearing storms using an operational polarimetric X-band radar. Atmos. Meas. Technol. 2015, 8, 4681–4698. [Google Scholar] [CrossRef] [Green Version]
- Bruno, G.; Pignone, F.; Silvestro, F.; Gabellani, S.; Schiavi, F.; Rebora, N.; Giordano, P.; Falzacappa, M. Performing Hydrological Monitoring at a National Scale by Exploiting Rain-Gauge and Radar Networks: The Italian Case. Atmosphere 2021, 12, 771. [Google Scholar] [CrossRef]
- Sinclair, S.; Pegram, G. Combining radar and rain gauge rainfall estimates using conditional merging. Atmos. Sci. Lett. 2005, 6, 19–22. [Google Scholar] [CrossRef]
- Pignone, F.; Rebora, N. GRISO: Rainfall Generator of Spatial Interpolation from Observation. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 27 April–2 May 2014; Volume 16. [Google Scholar]
- Roulston, M.S.; Smith, L.A. The boy who cried wolf revisited: The impact of false alarm intolerance on cost–loss scenarios. Weather Forecast. 2004, 19, 391–397. [Google Scholar] [CrossRef]
- Barnes, L.R.; Gruntfest, E.C.; Hayden, M.H.; Schultz, D.M.; Benight, C. False alarms and close calls: A conceptual model of warning accuracy. Weather Forecast. 2007, 22, 1140–1147. [Google Scholar] [CrossRef]
- LeClerc, J.; Joslyn, S. The cry wolf effect and weather-related decision making. Risk Anal. 2015, 35, 385–395. [Google Scholar] [CrossRef]
- Turco, M.; Milelli, M. The forecaster’s added value in QPF. Adv. Geosci. 2010, 25, 29–36. [Google Scholar] [CrossRef] [Green Version]
- Zängl, G.; Reinert, D.; Rípodas, P.; Baldauf, M. The ICON (ICOsahedral Nonhydrostatic) modelling framework of DWD and MPI-M: Description of the nonhydrostatic dynamical core. Q. J. R. Meteorol. Soc. 2015, 141, 563–579. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lagasio, M.; Campo, L.; Milelli, M.; Mazzarella, V.; Poletti, M.L.; Silvestro, F.; Ferraris, L.; Federico, S.; Puca, S.; Parodi, A. SWING, The Score-Weighted Improved NowcastinG Algorithm: Description and Application. Water 2022, 14, 2131. https://doi.org/10.3390/w14132131
Lagasio M, Campo L, Milelli M, Mazzarella V, Poletti ML, Silvestro F, Ferraris L, Federico S, Puca S, Parodi A. SWING, The Score-Weighted Improved NowcastinG Algorithm: Description and Application. Water. 2022; 14(13):2131. https://doi.org/10.3390/w14132131
Chicago/Turabian StyleLagasio, Martina, Lorenzo Campo, Massimo Milelli, Vincenzo Mazzarella, Maria Laura Poletti, Francesco Silvestro, Luca Ferraris, Stefano Federico, Silvia Puca, and Antonio Parodi. 2022. "SWING, The Score-Weighted Improved NowcastinG Algorithm: Description and Application" Water 14, no. 13: 2131. https://doi.org/10.3390/w14132131